فهرست محتوایی :
- صرفه جویی انرژی با درایوهای فرکانس متغیر
- گشتاور متغیر در مقابل گشتاور ثابت
- چرا بارهای گشتاور متغیر صرفه جویی انرژی قابل توجهی را ارائه می دهند.
- مصرف انرژی
- فرایند کنترل تنگ تر با درایوهای سرعت متغیر
- افزایش طول عمر تجهیزات و کاهش نیاز به نگهداری آنها
- مشکلات ناشی از راه اندازی با ولتاژ کامل
صرفه جویی انرژی با درایوهای سرعت متغیر
اگر شما یک موتور AC دارید و این موتور در کاربردی استفاده می شود که نیاز به کار در سرعت حداکثر خود را ندارد. آنگاه می توانید هزینه مصرف انرژی خود را با استفاده از یک درایو سرعت متغیر (VSD) کاهش دهید. درایوهای سرعت متغیر (که همچنین با عنوان درایوهای فرکانس متغیر (VFD) نیز شناخته می شوند) به شما اجازه می دهند، سرعت موتور گرداننده دستگاه را با نیاز فرآیند مورد نظر تطبیق دهد. گشتاور متغیر در برابر گشتاور ثابت درایوهای سرعت متغیر، و بارهایی که در آن به کار می روند به طور کلی به دو گروه تقسیم بندی می شوند: گشتاور ثابت و گشتاور متغیر. پتانسیل صرفه جویی در مصرف انرژی، در کاربردهای گشتاور متغیر بسیار بیشتر از کاربردهایی است که در آنها گشتاور ثابت است. بارهای گشتاور متغیر مشتمل بر پمپ های گریز از مرکز و فن ها که عمده کاربردهای آنها در HVAC هستند. بارهای گشتاور ثابت کانویرهای لرزشی (vibrating conveyers)، پرسهای پانچ، سنگ شکن ها، ماشین های ابزار و بقیه کاربردهایی که درایو از یک نرخ V/Hz ثابت تبعیت می کند.
چرا بارهای گشتاور متغیر صرفه جویی انرژی قابل توجهی را ارائه می کنند؟
در کاربردهای با گشتاور متغیر، گشتاور مورد نیاز تقریبا با مربع سرعت تغییر می کند، و توان مکانیکی مورد نیاز (hp) تقریبا با مکعب سرعت متغیر است. در نتیجه یک کاهش حتی کوچک در سرعت باعث کاهش قابل توجهی در توان خروجی می گردد. یک موتور در یک کاربرد گشتاور متغیر با ۵۰% سرعت نامی به اندازه ۲۵ درصد توان نامی خود توان مصرف می کند. این موضوع اشاره به روابط و قوانینی دارد که رابطه بین سرعت، جریان، گشتاور و توان خروجی را تعیین می کنند.
مصرف انرژی درایوهای سرعت متغیر (VSDs) به شما اجازه می دهند که در مقایسه با انواع دیگر تکنیکهای کنترل سرعت در هنگامی که نیاز به سرعت کمتر از سرعت نامی است انرژی کمتری مصرف کنید. که معمولا این حالت در کاربردهای HVAC است.
فرآیند کنترل تنگ تر با درایوهای سرعت متغیر
در هنگامی که صحبت از کنترل دقیق سرعت می شود هیچ روش کنترلی دیگری را نمیتوان با درایوهای فرکانس متغیر مقایسه کرد. ولتاژ کامل (ولتاژ دو سر خط) راه اندازها فقط میتواند موتور را در سرعت کامل به گردش درآورد. و راه اندازی نرم و راندازهای نرم (سافت استارترها) با ولتاژ کاهش داده شده صرفا سرعت موتور را بتدریج افزایش می دهند تا به سرعت کامل خود برسد. و سرعت را بر می گردانند به حالت ایستادن موتور. اما در سوی دیگر درایوهای سرعت متغیر می توانند به گونه ای برنامه ریزی شوند که در یک سرعت معین کار کنند، در یک سرعت مشخص متقف شوند و مقدار مشخصی گشتاور اعمال کنند. در حقیقت، درایوهای سرعت متغیر AC از لحاظ پاسخ گشتاوری سریع و دقت و صحت سرعت نزدیک به درایوهای DC هستند. اگر چه، موتورهای AC بسیار مطمئن تر و مقرون به صرفه تر از موتورهای DC هستند. که این مزیتها باعث شده بسیار فراگیر شوند. اغلب درایوهای مورد استفاده در این زمینه از نوع کنترل Volts/Hertz بهره می برند. که این درایوها عملکرد در حالت حلقه باز را تامین می کنند. این درایوها هیچ فیدبکی از انجام فرآیند کنترلی ندارند. اما در عمده کاربردهای مورد نیاز به درایوهای سرعت متغیر کافی هستند. اگر چه، بسیاری از درایوهای سرعت متغیر حلقه باز دارای جبران سازی لغزش هستند. که درایو را قادر می سازد جریانهای خروجی اش را اندازه گیری کرده و اختلاف بین سرعت واقعی و مقدار تنظیم شده (مقدار ورودی برنامه ریزی شده)را تخمین بزند. آنگاه درایو به صورت اتوماتیک خودش را بر اساس این مقدار تخمین زده شده به مقدار تنظیم شده منطبق و تنظیم می کند. اغلب درایوهای گشتاور متغیر در کاربردهای فن و پمپ ها دارای کنترل PID هستند که به درایو این امکان را می دهند که بر اساس فیدبک واقعی گرفته شده از فرآیند بر روی نقطه تنظیم شده نگه داشته شود و نه بر اساس تخمین پارامترها. یک ترانسدیوسر یا ترانسمیتر برای آشکار کردن متغیرهای موجود در فرآیند مانند سطوح فشار، نرخ گردش مایع، نرخ گردش هوا یا ارتفاع مایع استفاده می شود. سپس یک سیگنال به PLC ارسال می شود که فیدبک اخذ شده از فرآیند را به درایو منتقل می کند. درایوهای سرعت متغیر به صورت پیوسته از این فیدبک برای تنظیم و نگهداشتن خودشان بر روی نقطه تنظیم شده استفاده می کنند. مقدار دقت بیشتر برای کاربردهای دیگر را می توان با استفاده ار درایوهای که عملکرد حلقه بسته دارند تامین کرد. عملیات حلقه بسته می تواند با استفاده از درایو کنترل برداری field-oriented یا یک درایو کنترل برداری بدون سنسور انجام شود. درایو کنترل برداری field-oriented فیدبک فرآیند را از یک انکودر می گیرد، که اندازه گیری کرده و به درایو انتقال می دهد که آن هم سرعت و فرآیند را مانند یک کانوایر، ماشین ابزار یا اکسترودر کنترل می کند. سپس درایو خروجی ها را به گونه ای تنظیم می کند که مقادیر برنامه ریزی شده سرعت، نرخ، گشتاور و یا موقعیت تامین گردد.
افزایش طول عمر تجهیزات و کاهش نیاز به نگهداری آنها
روشهای راه اندازی تک سرعت به صورت ناگهانی موتور را راه اندازی می کند و موتور را تحت گشتاور راه اندازی و جریان راه اندازی بسیار زیادی قرار می دهد که جریان راه اندازی تا ۱۰ برابر جریان بار کامل نیز می رسد. اما در سوی دیگر، درایوهای سرعت متغیر، بتدریج سرعت موتور را افزایش می دهد تا به سرعت عملیاتی موتور برسد و از این طریق تنش های الکتریکی و مکانیکی را کاهش می دهد، و هزینه های تعمیرات و نگهداری را کاهش می دهد. و طول عمر موتور و دیگر تجهیزات دوار را افزایش می دهد. راه اندازهای نرم، یا راه اندازهای نرم با ولتاژ کاهش داده (RVSS)، نیز قادر است سرعت موتور را بتدریج افزایش دهد اما درایوها میتوانند بسیار مناسبتر و هموارتر این کار را انجام دهند. و میتوانند موتور را در سرعتی کمتر از سرعت کامل خود به کار گیرند تا فرسودگی و سائیدگی را کاهش دهند. درایوهای سرعت متغیر همچنین می توانند یک موتور را با یک الگوی مخصوص برای کاهش دادن تنش های الکتریکی و مکانیکی به کار بگیرند. برای مثال، یک الگوی منحنی S (S-curve pattern) برای استفاده در کانوایر میتواند برای کنترل هموارتر شتاب گیری/ شتاب دهی اعمال گردد. که شل شدگی را که ممکن است در حین شتاب گیری یا شتاب دهد رخ می دهد را کاهش می دهد.
مشکلات ناشی از راه اندازی با ولتاژ کامل
در لحظه برق دادن و راه اندازی موتور ، جریان راه اندازی (سرعت صفر) در حدود ۶۰۰% جریان بار کامل الکتروموتور است این جریان زیاد بعد از شتابگیری و افزایش سرعت موتور به تدریج کاهش می یابد. اما همین مساله باعث افت ولتاژ (voltage sag) غیر قابل قبول در سیستم قدرت می شود. که به صورت نامطلوبی بر دیگر بارهای سیستم تاثیر می گذارد. این مساله همچنین می تواند شوک مخرب گردیده و یا باعث فرسودگی داز مدت موتور شود. استفاده از این روش راه اندازی ممکن است شرکت برق را ترغیب کند که محدودیتهایی در مورد حداکثر سایز موتوری که شما میتوانید به شبکه متصل کنید اعمال کند. از آنجا که راه اندازی مستقیم با ولتاژ خط موجب ایجاد مشکلاتی در بالادست سیستم می گردد و برای بقیه مشتری ها و مصرف کنندگان ایجاد مشکل می کند. و راه اندازی و توقف مکرر موتور بر روی عایق های موتور تنش وارد می کندجهت دریافت بسته آموزشی فارسی سافت استارتر کلیک کنید

بسته آموزشی فارسی آشنایی با سافت استارتر







 از اینرو، توان مورد نیاز برای اینکه فن در 80 درصد سرعت کار کند نصف توان
نامی است. روابط فشار و توان بر حسب جریان مطابق منحنی شکل های 7 و
8 بدست می آید.
از اینرو، توان مورد نیاز برای اینکه فن در 80 درصد سرعت کار کند نصف توان
نامی است. روابط فشار و توان بر حسب جریان مطابق منحنی شکل های 7 و
8 بدست می آید. 


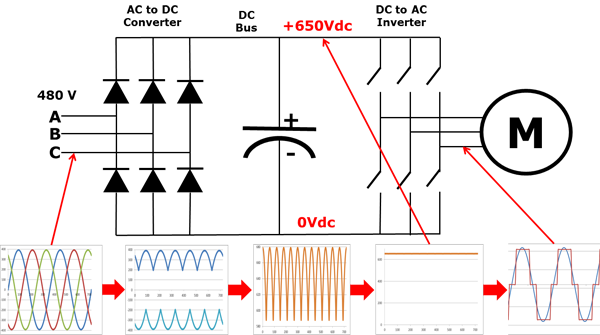 برای مثال فرض کنیم که درایو در یک سیستم قدرت ۴۸۰V کار می کند. ۴۸۰V
ولتاژ موثر (rms) است. پیک ولتاژ در یک سیستم ۴۸۰V مقدار ۶۷۹ ولت است. همان
طور که می بینید، باس dc درایو فرکانس متغیر دارای یک ولتاژ dc با ریپل AC
است. ولتاژ تقریبا بین ۵۸۰V و ۶۸۰V نوسان می کند.
برای مثال فرض کنیم که درایو در یک سیستم قدرت ۴۸۰V کار می کند. ۴۸۰V
ولتاژ موثر (rms) است. پیک ولتاژ در یک سیستم ۴۸۰V مقدار ۶۷۹ ولت است. همان
طور که می بینید، باس dc درایو فرکانس متغیر دارای یک ولتاژ dc با ریپل AC
است. ولتاژ تقریبا بین ۵۸۰V و ۶۸۰V نوسان می کند. 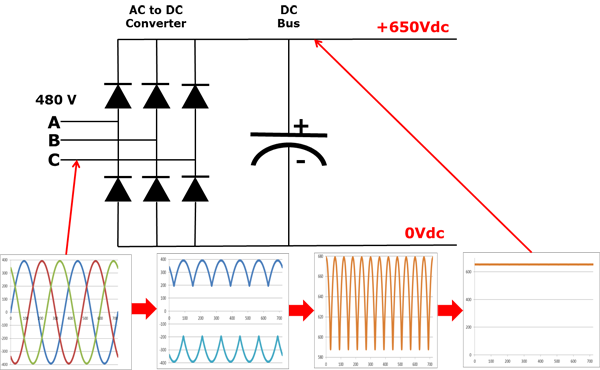 ما می توانیم با اضافه کردن یک خازن بر روی باس DC از ریپل AC خلاص شویم.
یک خازن مانند یک مخزن یا انباره در سیستم لوله کشی عمل می کند. این خازن
ریپل AC را جذب کرده و یک ولتاژ صاف تحویل می دهد. ریپل AC بر روی باس DC
نوعا کمتر از ۳ ولت است. بنابراین، ولتاژ روی باس DC تقریبا ۶۵۰VDC می شود.
ولتاژ حقیقی بستگی به عواملی مانند سطح ولتاژ خط AC تغذیه کننده درایو ،
سطح عدم تعادل ولتاژ روی سیستم قدرت، بار موتور، امپدانس سیستم قدرت، و هر
راکتور یا فیلتر هارمونیکی که بر روی درایو قرار گرفته اند. دارد. مبدل پل
دیود که ولتاژ AC را به DC تبدیل می کند. بعضی اوقات تنها با عنوان کانورتر
شناخته می شود. مبدلی که ولتاژ DC را به ولتاژ AC بر می گرداند نیز یک
کانورتر است، اما برای تمایز دادن از مبدل دیودی، با عنوان اینورتر شناخته
می شود. در صنایع متداول شده است که هر مبدلی که DC را به AC تبدیل می کند
به عنوان اینورتر شناخته می شود.
ما می توانیم با اضافه کردن یک خازن بر روی باس DC از ریپل AC خلاص شویم.
یک خازن مانند یک مخزن یا انباره در سیستم لوله کشی عمل می کند. این خازن
ریپل AC را جذب کرده و یک ولتاژ صاف تحویل می دهد. ریپل AC بر روی باس DC
نوعا کمتر از ۳ ولت است. بنابراین، ولتاژ روی باس DC تقریبا ۶۵۰VDC می شود.
ولتاژ حقیقی بستگی به عواملی مانند سطح ولتاژ خط AC تغذیه کننده درایو ،
سطح عدم تعادل ولتاژ روی سیستم قدرت، بار موتور، امپدانس سیستم قدرت، و هر
راکتور یا فیلتر هارمونیکی که بر روی درایو قرار گرفته اند. دارد. مبدل پل
دیود که ولتاژ AC را به DC تبدیل می کند. بعضی اوقات تنها با عنوان کانورتر
شناخته می شود. مبدلی که ولتاژ DC را به ولتاژ AC بر می گرداند نیز یک
کانورتر است، اما برای تمایز دادن از مبدل دیودی، با عنوان اینورتر شناخته
می شود. در صنایع متداول شده است که هر مبدلی که DC را به AC تبدیل می کند
به عنوان اینورتر شناخته می شود. 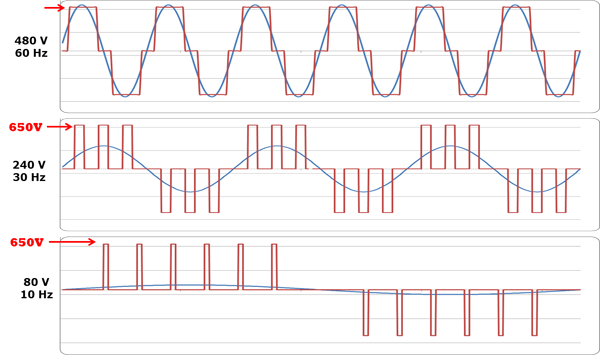 موج سینوسی آبی رنگ تنها برای مقایسه نشان داده شده است. درایو در حالت
واقعی این موج سینوسی را تولید نمی کند. توجه کنید که خروجی از VFD یک شکل
موج مستطیل شکل است. VFD ها خروجی سینوسی تولید نمی کنند. این شکل موج
مربعی انتخاب خوبی برای سیستم توزیع توان نیست، اما برای استفاده در موتور
کاملا مناسب است. اگر ما بخواهیم فرکانس موتور را به ۳۰Hz کاهش دهیم، آنگاه
ما به راحتی خروجی اینورتر را خیلی آهسته تر سوئیچ زنی می کنیم. اما، اگر
ما فرکانس را به ۳۰Hz کاهش دهیم، آنگاه به منظور ثابت نگه داشتن نسبت V/Hz
بایستی ولتاژ را به ۲۴۰V کاهش دهیم. ( به تئوری درایو V/F ثابت مراجعه
کنید). چگونه ما خواهیم توانست ولتاژ را کاهش دهیم در حالی که تنها ولتاژی
که داریم ولتاژ باس ۶۵۰VDC است؟ این کار مدولاسیون پهنای پالس نامیده می
شود. تصور کنید که ما بتوانیم فشار آب مسیر را با باز و بسته کردن بسیار
سریع شیر موجود، کنترل کنیم. ذر حالیکه انجام این کار در سیستم های لوله
کشی عملی نخواهد بود، به خوبی در مورد VFD ها به کار گرفته می شود. توجه
کنید در طی نیم سیکل اول، در نصف زمانهای یک سیکل ولتاژ را در خروجی داریم و
در نیم سیکل دیگر ولتاژی نداریم. از اینرو، متوسط ولتاژ خروجی ۲۴۰V، معادل
نصف ولتاژ باس تغذیه ۴۸۰V است. با کنترل پالسهای خروجی، می توانیم هر
ولتاژ متوسطی که بخواهیم بر روی خروجی VFD ایجاد کنیم.
موج سینوسی آبی رنگ تنها برای مقایسه نشان داده شده است. درایو در حالت
واقعی این موج سینوسی را تولید نمی کند. توجه کنید که خروجی از VFD یک شکل
موج مستطیل شکل است. VFD ها خروجی سینوسی تولید نمی کنند. این شکل موج
مربعی انتخاب خوبی برای سیستم توزیع توان نیست، اما برای استفاده در موتور
کاملا مناسب است. اگر ما بخواهیم فرکانس موتور را به ۳۰Hz کاهش دهیم، آنگاه
ما به راحتی خروجی اینورتر را خیلی آهسته تر سوئیچ زنی می کنیم. اما، اگر
ما فرکانس را به ۳۰Hz کاهش دهیم، آنگاه به منظور ثابت نگه داشتن نسبت V/Hz
بایستی ولتاژ را به ۲۴۰V کاهش دهیم. ( به تئوری درایو V/F ثابت مراجعه
کنید). چگونه ما خواهیم توانست ولتاژ را کاهش دهیم در حالی که تنها ولتاژی
که داریم ولتاژ باس ۶۵۰VDC است؟ این کار مدولاسیون پهنای پالس نامیده می
شود. تصور کنید که ما بتوانیم فشار آب مسیر را با باز و بسته کردن بسیار
سریع شیر موجود، کنترل کنیم. ذر حالیکه انجام این کار در سیستم های لوله
کشی عملی نخواهد بود، به خوبی در مورد VFD ها به کار گرفته می شود. توجه
کنید در طی نیم سیکل اول، در نصف زمانهای یک سیکل ولتاژ را در خروجی داریم و
در نیم سیکل دیگر ولتاژی نداریم. از اینرو، متوسط ولتاژ خروجی ۲۴۰V، معادل
نصف ولتاژ باس تغذیه ۴۸۰V است. با کنترل پالسهای خروجی، می توانیم هر
ولتاژ متوسطی که بخواهیم بر روی خروجی VFD ایجاد کنیم.